
1 Investigation of load assumptions |
[German version] |
1.3 Lane changingRapid lane changing is also included among problematic driving situations. It may be concluded from publications (2) that conventional lane changing for a truck involves a lateral offset of 3.75 m and a lane change lasting 4 seconds may be regarded as very rapid. Analysis of such a lane change is based on the driven geometric contour of the vehicle’s center of gravity. This contour is often represented by an "inclined sine curve". There are, however, also other meaningful mapping functions. The second time derivative of the mapping function reveals the profile of the transverse acceleration of the vehicle, which may be equated with a good approximation to the centrifugal force. Representing centrifugal force more accurately with the assistance of the curve radius does not reveal any appreciable difference with the conventionally slender curve profiles. Inclined sine curve:
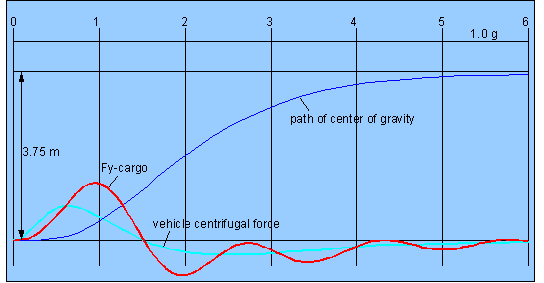
Alternative lane changing profile:
Figure 5: Lane changing according to the alternative calculation profile The lane change shown in Figure 5 was calculated using the alternative, asymmetric profile. In order to maintain comparability with the inclined sine curve in the first half, the lane changing time of 4 seconds is determined by doubling the time required for half the transverse distance. With a half-value period of 2 seconds, this is already a very rapid lane change. The transverse force acting on the cargo reaches just about 0.3 g after around one second and is already appreciably out of phase with the distinctly smaller centrifugal force. The rolling oscillations are pronounced. There is, however, no discernible resonant buildup. A series of test runs with modified input variables allows the following general conclusions to be drawn:
|
|
Top of page
| Contents
| |