

| Innovative Antriebe und Motoren von VOLVO PENTA – IPS Antriebe – |
|
| Vortrag von Herrn Rasmus Töpsch, Volvo Penta |
Inhaltsverzeichnis
Einführung
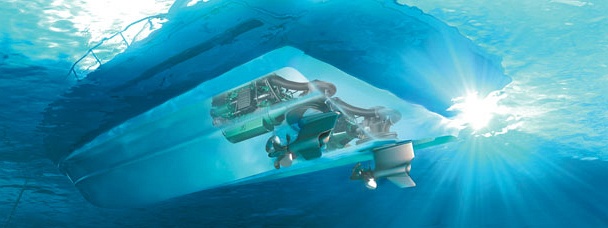
Im Gegensatz zu anderen Schiffsantrieben sind IPS Antriebe (IPS = Inboard Performance System) als gegenläufige Propellerpaare nach vorne ausgerichtet, also in Fahrtrichtung zum Bug hin. Sie arbeiten daher in unverwirbeltem Wasser und erzeugen einen waagerechten Schub. Die Antriebsaggregate bilden zusammen mit dem Motor eine komplette Einheit und werden elektronisch gesteuert. Die Steuerung des Bootes geschieht nicht über Ruderblätter, sondern über das bewegliche (drehbare) Unterwasserteil des Antriebsaggregates (Ruderpropeller-Prinzip).

Zum Antrieb eines IPS kommen i. d. R. Dieselmotoren zum Einsatz, in den USA auch Benzinmotoren, da diese dort beliebter sind.
Zurück zum Anfang
Die IPS-Story
Die Geschichte der IPS-Antriebe reicht weit zurück und wurde über die Zeit ständig weiterentwickelt. Der Antrieb wurde erst auf den Markt gebracht, als er entsprechend ausgereift war.

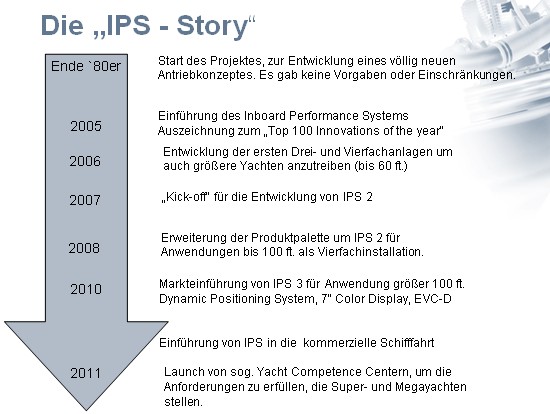
Ende der 80er Jahre wurde der Markt für große Yachten zunehmend größer und die Ansprüche an den Antrieb stiegen. Das betraf ein ruhiges Fahrverhalten ebenso wie niedrige Schadstoff-Emissionen sowie niedrigen Kraftstoffverbrauch. Zudem war ein Alleinstellungsmerkmal gegenüber Mitbewerbern gefragt.
Daraufhin wurde das IPS System entwickelt, das im Jahr 2005 auf den Markt kam. Dabei gab es keinerlei Vorgaben, es sollte "lediglich" das bestmöglichste Antriebssystem entwickelt werden. Es war weder ein Zeitlimit noch ein festes Budget zu beachten.
Zunächst wurde das IPS System als Doppelanlage entwickelt, denn zwei Antriebe sind für das Wirkungsprinzip mindestens erforderlich. Ab 2006 wurde dann ein dritter Antrieb als Booster in der Mitte des Rumpfes eingesetzt. Zudem wurde eine Vierfachanlage, wobei jeweils zwei Antriebe parallel geschaltet sind, entwickelt. All dies führte zu einer noch höheren Leistung, die auch große Boote bis 60 Fuß Länge auf 35 Knoten beschleunigen kann.
2007 zeigte sich, das noch mehr Leistung gefragt war, da auch noch größere Boote bzw. Superyachten über 60 Fuß Länge damit ausgestattet werden sollten. Daraufhin wurde IPS 2 entwickelt, das als Vierfachanlage auch in 100-Fuß-Yachten zum Einsatz kamen.
2009 wurde IPS 3 entwickelt, das bisher leistungsstärkste System. Es kommt ebenfalls als Vierfachanlage auf den Markt und bringt eine Leistung von 4.800 PS.
Ein großer Vorteil der IPS Antriebe ist neben den hohen Geschwindigkeiten die enorme Manövrierbarkeit, Boote können damit u. a. seitwärts fahren und z. B. auf engstem Raum gedreht bzw. in Parkposition gebracht werden. Daher werden in Zukunft. Lotsenboote und Rettungsboote oft mit diesen Antrieben ausgerüstet werden.
Bis 2011 sollen Kompetenzzentren aufgebaut werden, um professionellen Nutzern und Yachtbesitzern einen adäquaten Service für diese Antriebe bieten zu können.
Dieser Videofilm zeigt die "Inside Story" von Volvo Penta IPS:
Zurück zum Anfang
Vorraussetzungen für den effizienten Einsatz von IPS
Der richtige Einbau der IPS Antriebe ist Voraussetzung für ihren effizienten Einsatz.
Deshalb wurde die "Certified Installation" (zertifizierte Installation) als Marke eingeführt, um bereits beim Bootsbau auf den optimalen Einsatz der IPS Antriebe hinwirken zu können. Ingenieure von Volvo Penta arbeiten daher bereits in einem frühen Stadium bei der Entwicklung der Boote mit.
Auch das Büro Det Norske Veritas führt die Baumusterprüfung der IPS Antriebe durch.
 |
 |
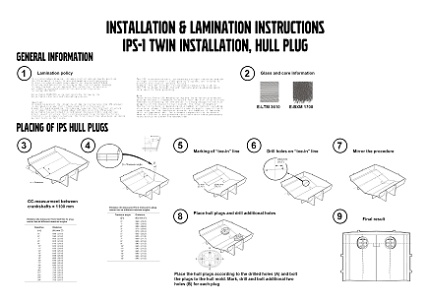
Im oberen Teil der folgenden Abbildung ist ein Ring zu sehen. Dieser dient der Verstärkung des Rumpfes, damit die im Antrieb integrierte Sollbruchstelle wirken kann. Der Antrieb würde bei Grundberührung, d. h. einem Auflaufschaden, an dieser Sollbruchstelle "abbrechen", wodurch eine Beschädigung des Rumpfes und ein mögliches Sinken des Bootes verhindert wird (s. unterer Teil der Abbildung).
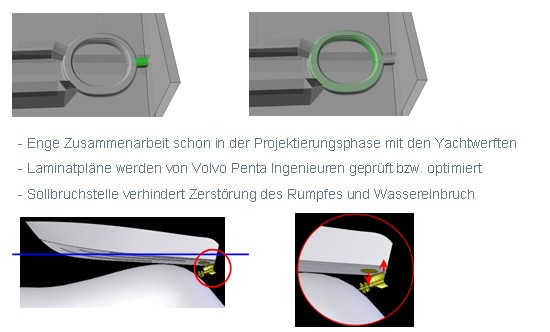
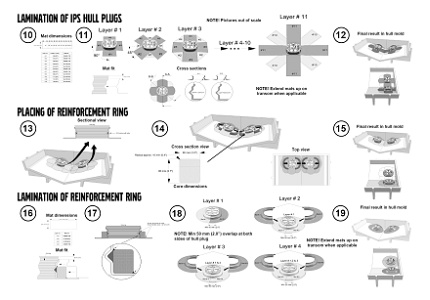
Volvo Penta macht deshalb Vorgaben zur korrekten Auslegung und Gestaltung des Laminates im Bereich der POD-Antriebe. Diese Abbildungen zeigen solche Laminatspläne:
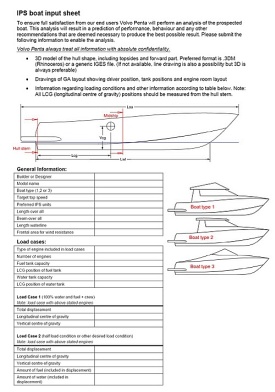
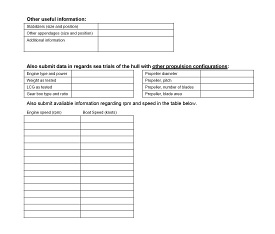
Um die optimale IPS-Antriebskonfiguration empfehlen zu können, werden Datenblätter (IPS Boat Input Sheets, s. nächste Abbildung) zum Erfassen der Bootsdaten verwendet. Diese werden bereits in der Konzeptphase der Bootsbaus an Volvo Penta geschickt. Dadurch soll sichergestellt werden, dass die Leistung den Kunden zufriedenstellt.
 Für vergrößerte Ansicht Abbildung bitte anklicken. |
 Für vergrößerte Ansicht Abbildung bitte anklicken. |
Diese Abbildung vermittelt einen Überblick, welche Rumpfformen für IPS geeignet sind und welche nicht:
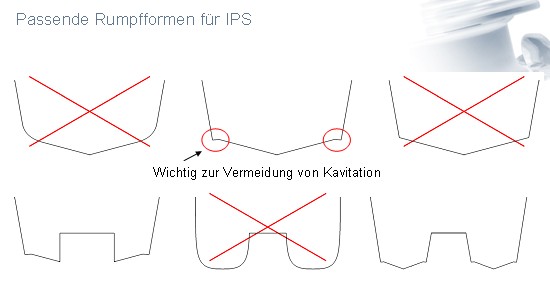
Die Kanten am Rumpf, die in der Abbildung oben rot umkreist sind, sind sehr wichtig. Sie sollen durch eine vorgegebene Wasserführung unter dem Rumpf eine Kavitation an den Propellern verhindern. Zudem sorgen sie für einen ruhigen und stabilen Geradeauslauf des Bootes bei hoher Geschwindigkeit.
 |
Ob ein Boot IPS-tauglich ist, kann der Kunde an diesem Zertifikat erkennen, das dem Boot beiliegt. Mit diesem Zertifikat hat der Kunde die Gewissheit, dass seine Antriebsanlage einwandfrei funktioniert und im "Falle eines Falles" zu 100 % von der Volvo Penta Garantie geschützt ist. Die Zertifizierung erfolgt nach Abnahme des Bootes durch einen Volvo-Ingenieur. |
Zurück zum Anfang
Leistungsfähigkeit des IPS
Die Leistungsfähigkeit eines IPS-Antriebes ist in der folgenden Abbildung der einer konventionellen Wellenanlage gegenübergestellt.
IPS ist nicht als Alternative zu einem Stern-Drive, bzw. Aquamatic zu sehen, sondern deckt den Bereich darüber ab (über dem Z-Antrieb), also für Bootsgrößen über 35′ bis über 100′ in Doppelanlage. In diesem Bereich fängt IPS erst an.
Diese Abbildung zeigt für drei verschiedene Bootsgrößen 41′, 55′ und 62′, dass der IPS-Antrieb (IPS 1, IPS 2 bzw. IPS 3 jeweils in Doppelinstallation) der konventionellen Wellenanlage in Punkto Geschwindigkeit, Kraftstoffersparnis und Reichweite überlegen ist.
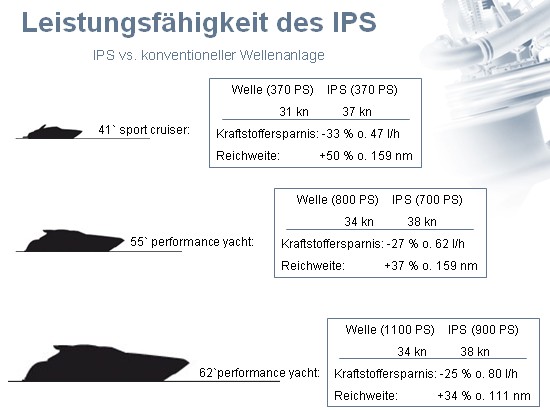
Bei allen Booten handelt es sich um die gleichen 6-Zylinder Common Rail Reihen-Dieselmotoren, nur mit unterschiedlichem Hubraum – einmal als Wellenanlage und einmal als IPS.
Was führt zu dieser Überlegenheit der IPS Antriebe? Einige Gründe sind im Folgenden zusammengestellt.
Nach vorn gerichtete Propeller können in unturbulentem Wasser arbeiten:

| Abgase werden mit dem Propellerstrom vom Boot weggetragen. Dadurch entsteht kein "Station Wagon Effect": |  |
|
| Die Propellerposition direkt unter dem Rumpf schließt die Gefahr von Kavitation aus. | 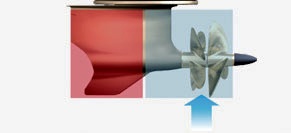 |
|
| Nach vorn gerichtete Propeller, deren Nabe keine Abgasführung benötigt, können bei gleichem Durchmesser eine größere effektive Blattfläche haben, was zu einem besseren "Griff" im Wasser führt. |  |
Zudem können im Vergleich zu anderen Antrieben bei gleicher Leistung die Propeller kleiner gehalten werden, was wiederum zur Verhinderung der Kavitation beiträgt.
Zurück zum Anfang
Das IPS im Detail
Diese Abbildung zeigt den Aufbau eines IPS-Antriebes. Der Bootsboden sitzt auf Höhe des Mittelteils zwischen zwei Gummiringen, die auch der Schall- und Vibrationsdämpfung dienen. Das Mittelteil muss bereits beim Bootsbau vorinstalliert werden.
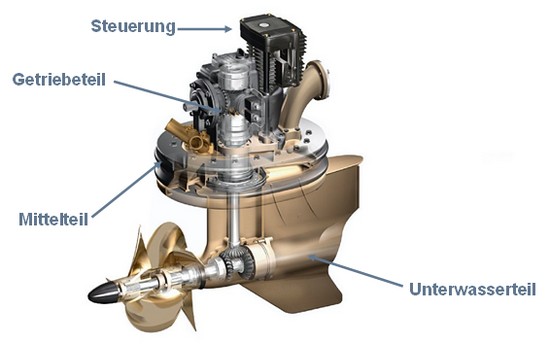
Wie zuvor erwähnt, kann das Unterwasserteil im Falle einer Grundberührung bzw. Kollision mit einem Unterwasserhindernis an einer Sollbruchstelle abgetrennt werden.
Die Steuerung besteht aus einem Schrittmotor mit einer Elektronik. Der Schrittmotor dreht, die Elektronik registriert die Position des Antriebs.
Das Getriebe ist ein herkömmliches hydraulisches Wendegetriebe, bei dem ein "Rückwärtsgang" eingelegt werden kann.
Alle Komponenten können einfach und schnell einzeln demontiert werden, so dass bei Reparaturen nicht der komplette Antrieb in die Werkstatt gebracht werden muss.
Das EVC-System
Die "Gehirne" des EVC-Systems sind in dieser Abbildung dargestellt. Das EVC-System basiert auf Can-Bus-Technologie. Es sind voll vergossene Gehäuse mit IP7 geschützten Steckern.
Neuere Modelle ab 2009 weisen gerundete bzw. geschwungene Gehäuseformen auf.
Die PCU generiert aus dem Can-Bus Signal Analogdaten, die der Motor verwerten kann.
Die HCU wiederum ist für den analogen Input und Output zuständig. (Lenken, Gas geben usw. sind als analoge Eingabe zu verstehen, die Instrumente wie Tankanzeige, Temperaturanzeige usw. als analoger Output.)
Zwischen den Geräten besteht eine Can-Bus-Verbindung. Der Can-Bus ist immer mindestens redundant ausgeführt.
Dieses Blockschaltbild stellt das EVC-Netzwerk an Bord schematisch dar:
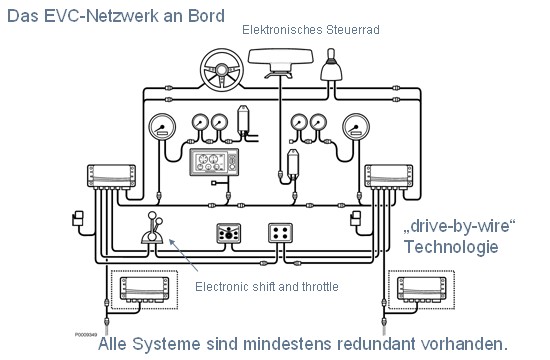
Ganz oben sieht man das elektronische Steuerrad und den Joystick (analoge Eingabe), darunter die Instrumente (analoge Ausgabe). Der Can-Bus arbeitet ausschließlich digital, dies geschieht in den beiden Control Units, die in der Mitte des Schemas links und rechts dargestellt sind.
Die meisten Komponenten sind jeweils zweifach vorhanden, da es sich um den Schaltplan einer Doppelanlage (zwei Antriebe) handelt.
Zurück zum Anfang
Antriebsmotoren für IPS
Die verschiedenen IPS Antriebe decken derzeit ein Leistungsspektrum von PS bis 4.800 PS ab, und zwar als Doppel-, Dreifach-, oder Vierfachinstallation:
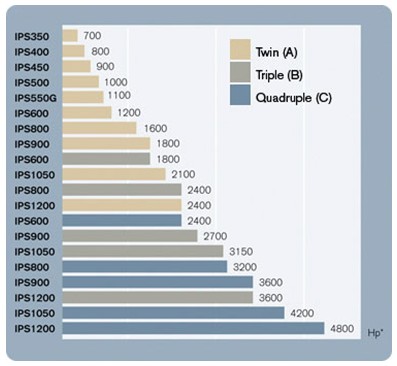
Diese PS-Angaben entsprechen den Äquivalenten von Wellenanlagen, dabei gilt größenordnungsmäßig: 350 PS bei IPS entsprechen 260 PS Kurbelwellenleistung.
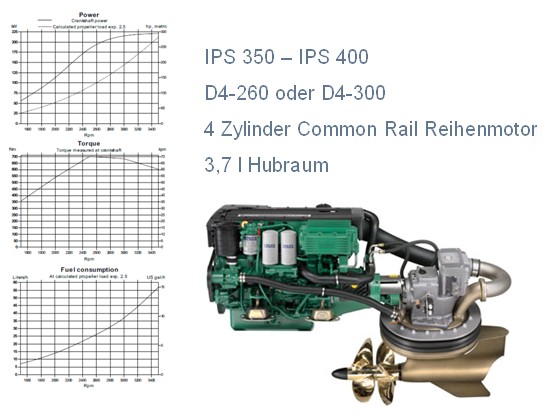
Antriebsmotoren für IPS I
Die kleinste Antriebsvariante ist der D4-260 oder D4-300 mit einem 4 Zylinder Common Rail Reihenmotor mit 3,7 l Hubraum:
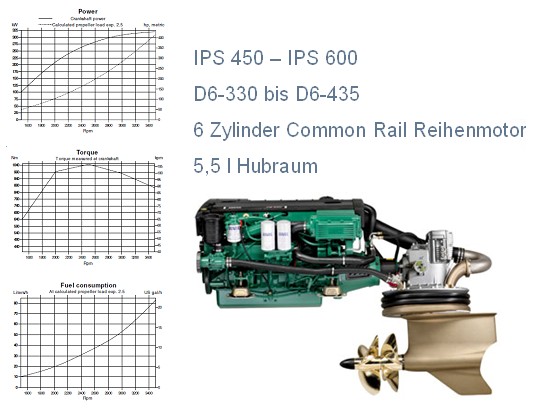
Die nächstgrößere Leistungsklasse D6-330 bis D6-435 verfügt bereits über einen 6 Zylinder Common Rail Reihenmotor mit 5,5 l Hubraum und Kompressor:
Antriebsmotoren für IPS II
Im mittleren Leistungsbereich liegt D11-600 bis D11-700, der ebenfalls mit einem 6 Zylinder Common Rail Reihenmotor ausgestattet ist, allerdings mit 10,8 l Hubraum:
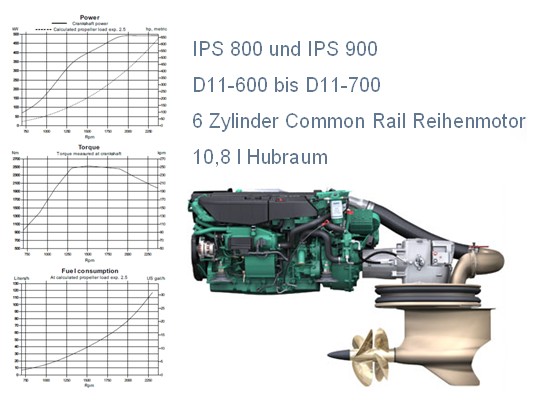
Das ist im Prinzip ein Lkw-Motor, der für die Anforderungen des IPS Antriebs speziell angepasst wurde.
Antriebsmotoren für IPS III
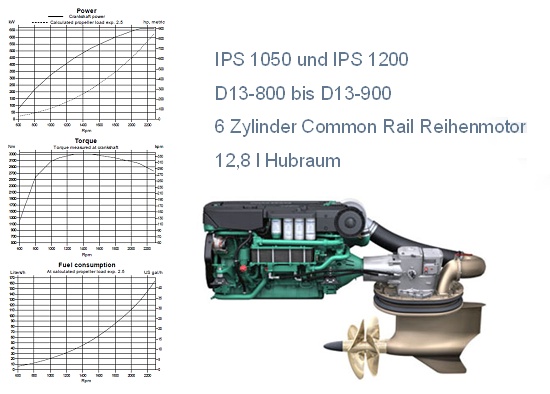
In der größten Leistungsklasse liegt der D13-800 bis D13-900, dessen 6 Zylinder Common Rail Reihenmotor einen Hubraum von 12,8 l aufweist. Dieser Antrieb verfügt zudem über einen sehr große Ladeluftkühler und Kompressor und wird bei Mega-Yachten eingesetzt:
Zurück zum Anfang
Zubehör für das IPS
Einige aktuelle, als Zubehör erhältliche Geräte sind hier dargestellt:

Der oben rechts abgebildete Fahrhebel (Multifunction Control Lever) verfügt über eine integrierte HCU.
Der Joystick +
Dieser Joystick wurde bzgl. Design und Haptik gegenüber den Vorgängermodellen stark verändert, der Griff ist jetzt drehbar. Damit lässt sich eine Drehung des Schiffs um die eigene Achse bewirken. Wird der Griff zur Seite gedrückt, fährt das Schiff seitlich (wie unten rechts in der folgenden Abbildung angedeutet).

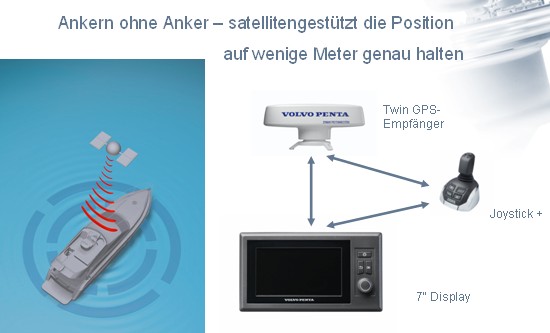
Dynamic Positioning System
Mit dem Dynamic Positioning System (DPS) kann z. B. eine Position dauerhaft gehalten werden, ohne ankern zu müssen – auch bei Strömung und/oder Wind. Das ist praktisch, wenn z. B. vor einer Klappbrücke, einer Schleuse oder beim Tanken gewartet werden muss. Für die Positionierung wird ein Twin-GPS-Empfänger eingesetzt:
Active Corrosion Protection
Auch wenn die Unterwasserteile aus hochwertigster Legierung bestehen, können durch geänderte Umweltbedingungen galvanische Ströme entstehen, welche die Bauteile angreifen. Davor schützt die Active Corrosion Protection (ACP). Diese misst und korrigiert ständig und informiert über den Schutzstatus. Wenn nötig, wird aus der Bordbatterie durch Spannungsabgabe in das Wasser gegengesteuert – dies bedeutet einen geringen Stromverbrauch, schützt aber aktiv kontinuierlich die wertvollen Antriebsteile vor Beschädigung durch galvanische Ströme.

Zurück zum Anfang
Denkbare Schadensfälle
Eine konventionelle Wellenanlage fingiert bei einem Zusammenstoß mit einem Unterwasserhindernis als „Knautschzone“. Je nach Kraftübertragung im Rumpf können dadurch Schäden am Lagerbock, am Rumpf oder schlimmstenfalls sogar am Motor entstehen. Diese Abbildung zeigt eine auf diese Weise schwer beschädigte Yacht:

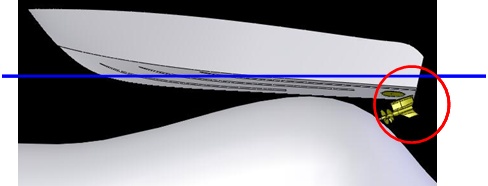
Der GAU ist ein Zusammenstoß mit einem Unterwasserhindernis. Dabei würde ein IPS POD aufgrund der zuvor beschriebenen Sollbruchstelle abscheren und daher den Bootsrumpf unbeschädigt lassen:
Richtwerte für dadurch entstehenden Kosten sind im Folgenden aufgelistet.
Verlust eines POD-Unterteils – ungefähre Ersatzteilkosten:
| IPS I: | ca. 6.800 € |
| IPS II: | ca. 11.800 € |
| IPS III: | ca. 17.200 € |
jeweils plus Propellersatz und zzgl. Arbeitskosten.
Die Folgen eine derartigen Havarie und das Abscheren des Unterwasserteils wurden intensiv untersucht:
| Es wurden intensive Testreihen mit verschiedenen Laminatstrukturen durchgeführt. | |
| Echte Crashtests wurden durchgeführt. | |
| Verschiedene Auflaufszenarien simuliert und getestet. |
Dabei kam es nie zu einem Wassereinbruch!
Nach vorn gerichtete Propeller – ein Sicherheitsrisiko?
Mitbewerber weisen gern auf das Risiko hin, welches nach vorn gerichtete Propeller mit sich bringen würden. Bis heute ist Volvo Penta nicht ein zerstörter Propeller bekannt.
Entscheidend ist, dass Mitbewerber keine Sollbruchstelle vorsehen, so dass ein signifikant höheres Leckagerisiko beim Auflaufen besteht.
| Vollständiger Schutz des Antriebs nur bei entsprechendem Rumpfdesign (Tunnel). | |
| Dies verschlechtert den Wirkungsgrad und ist | |
| bei kaum einem Schiff vorhanden. |
Zurück zum Anfang
Die zukünftige Entwicklung von IPS
Die Entwicklung geht dahin, das Einsatzgebiet der IPS Antriebe von Yachten zu Super- und Megayachten zu erweitern. Als Projekt ist IPS für Yachtgrößen von 140 bis 160 Fuß in Planung.

Aufgrund der hohen Zuverlässigkeit von IPS soll es von der Freizeitanwendung zur kommerziellen Nutzung geführt werden.
Derzeit ist in Estland ein Lotsenboot mit IPS 3-Antrieb in Bau.
Zudem wird eine Klassifizierung durch weitere Gesellschaften (GL, BV, ABS, etc.) angestrebt.
Um dieses wachsende Segment entsprechend bedienen zu können, wird derzeit am Aufbau einer Serviceorganisation gearbeitet, die den gewachsenen Ansprüchen gerecht wird.
Wichtig sind dabei kurze Reaktionszeiten und Mitarbeiter, die sich souverän in dem entsprechenden Umfeld bewegen.

Zurück zum Anfang